Lesson
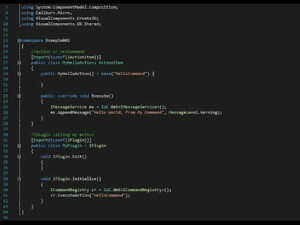
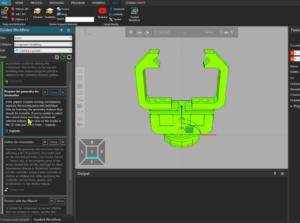
Find and Use Python Add-ons
COMPONENT MODELING | ROBOTICS
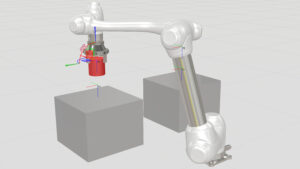
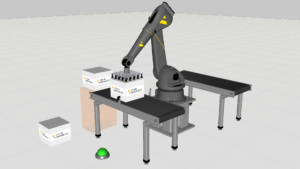
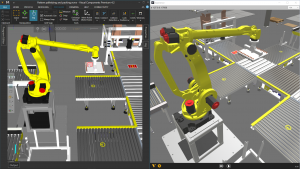
Learn how to teach a robot to grasp and release components using a gripper modeled from imported geometry.
Software Version: 4.0.1 or higher
14 answers.
Component Modeling
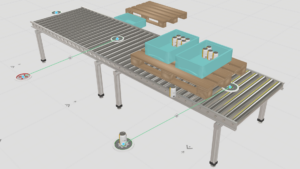
Explains the steps needed to model a functioning OLP layout from CAD with examples.
Component Modeling
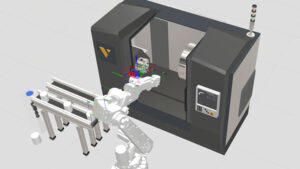
In this tutorial you will learn how to create a dual axis rotary positioner from imported geometry in Visual Components.
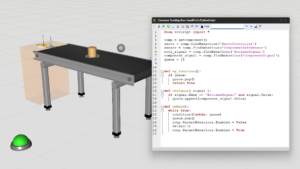
Component Modeling
In this tutorial you will learn how to single axis robot positioner from imported geometry.
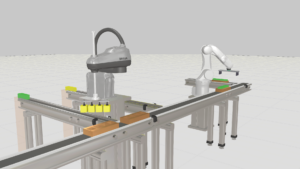
Component Modeling
Learn how to teach a robot to grasp and release components using a gripper modeled from imported geometry.
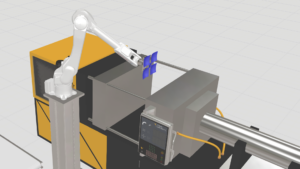
Component Modeling
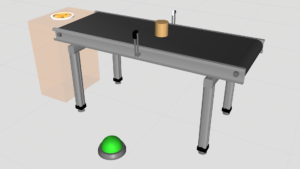
Learn how to model a gripper from imported geometry.