Lesson
Find and Use Python Add-ons
CONNECTIVITY | CONNECTING TO SERVER
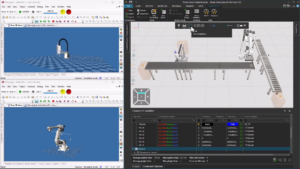
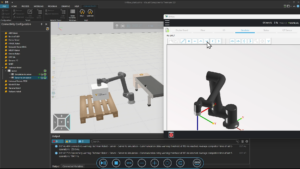
Learn how to connect a Visual Components model to the Doosan robot controller. The post-processor add-on can be used to translate a Visual Components robot program to Doosan’s DRL scripting language. The Doosan controller can be either a real or virtual controller. In this tutorial, the virtual controller is run on Doosan’s DART-Studio software.
Note: We currently cannot use the input and wait input signal statements in our robot programs, because the Doosan interface that the plugin uses does not allow the simulation to write the input signal values. We will provide an update as soon as one becomes available.
Note that to complete this exercise, you need to download/install:
Software Version: 4.7.0 or higher
Product: Premium
2 answers.
Connectivity
Learn how to use LS Electric connectivity plugin
Connectivity
Learn how to use the MQTT Client to connect to an MQTT broker.
Connectivity
Learn how to connect a Denso robot to simulation.
Connectivity
Learn how to use connectivity plugin for Techman robots.
Connectivity
Learn how to use MELFA robot connectivity plugin.
Connectivity
Learn how to connect a Yamaha robot to simulation.
Connectivity
In this tutorial you will learn how to connect a Visual Components Omron robot model to Omron ACE software.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Kawasaki robot controller.