Lesson
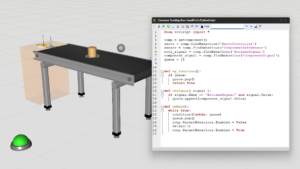
Find and Use Python Add-ons
CONNECTIVITY | CONNECTING TO SERVER
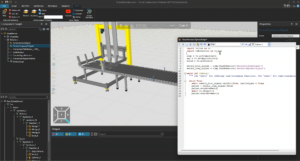
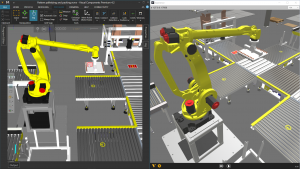
In this tutorial you will learn how to connect a simulation model to a Yaskawa robot controller. With connectivity you are able to virtually commission your robot programs or monitor the behavior of an existing robot system. This tutorial covers the creation of a virtual controller in Yaskawa MotoSim software, post-processing the Visual Components robot program and creating a connection between the Visual Components model and the virtual controller.
Note: that to complete this exercise you will need the following:
Yaskawa MotoSim EG-VRC available from your regional Yaskawa office or website.
MotoSim plugin available from visualcomponents.com/downloads
Software Version: 4.9.0 or higher
Product: Premium or Premium OLP
4 answers.
Connectivity
Learn how to use LS Electric connectivity plugin
Connectivity
Learn how to use the MQTT Client to connect to an MQTT broker.
Connectivity
Learn how to connect a Denso robot to simulation.
Connectivity
Learn how to use connectivity plugin for Techman robots.
Connectivity
Learn how to use MELFA robot connectivity plugin.
Connectivity
Learn how to connect a Yamaha robot to simulation.
Connectivity
In this tutorial you will learn how to connect a Visual Components Omron robot model to Omron ACE software.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Kawasaki robot controller.