Lesson
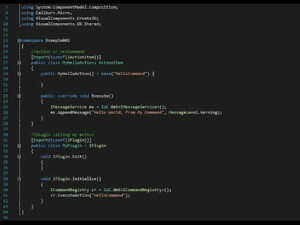
Find and Use Python Add-ons
Add a Gallery Menu
Course
Creating Add-ons
Add a Scene Graph Panel
Add a Background Plugin
Lesson New
Container Concept in Visual Components
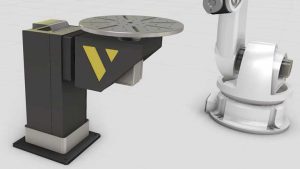
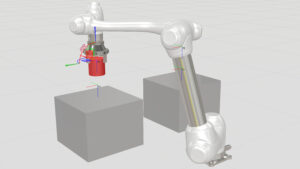
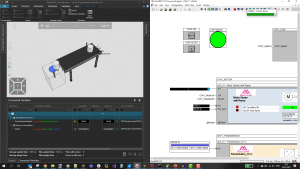
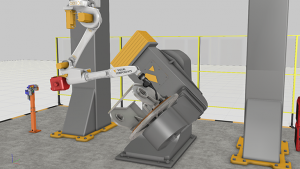
Modeling a Workpiece Positioner
Test - What did you think about the lesson
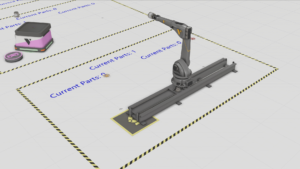
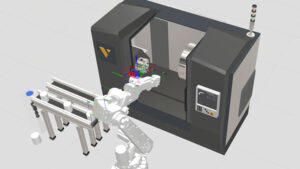
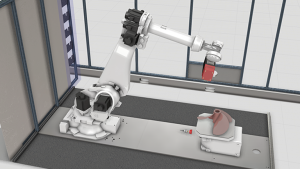
Modeling a Robot Positioner
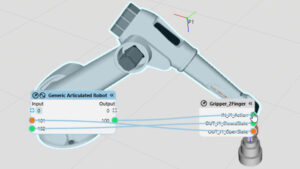
Model a Robot Gripper – Part II
Doosan Robot Connectivity Plugin
ABB Robots Connectivity Plugin
Fanuc Connectivity Plugin
SIMIT Plugin Tutorial
Connect to WinMOD simulation
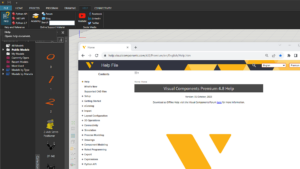
Access Help Files and Online Material
Start Using Visual Components
Frequently Asked Questions
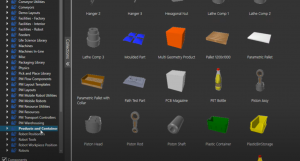
eCatalog Content
How to Use eCatalog Panel
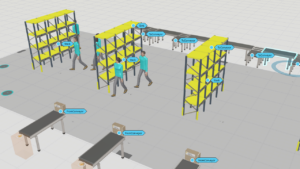
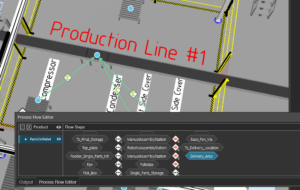
Adding Transport Links and Using Transport Link Tools in Process Modeling
Process Modeling Flows
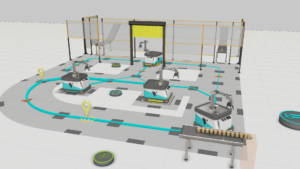
Using Process Modeling Navigation components
Introduction to Process Statements - Part 1
Process Modeling Resources Manual
Introduction to Robotics OLP
OLP Basic workflow for welding
Using Tool Solver and Via Solver in OLP
Export and Import a Robot Program
Robot Reachability Part II
Web viewer for custom HMIs
Introduction to Interactive VR
Streaming Simulation to VR
Live Stream a Simulation
Showing {{ posts.length }} / {{ totalPosts }} lessons
No results.