Lesson
Find and Use Python Add-ons
ROBOT SIMULATION | ROBOT TEACHING
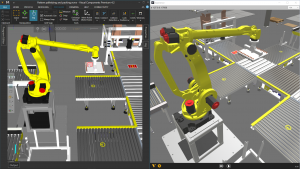
A continuation of our Robot Reachability Part I video, in this video you will learn how to check robot joints, joint limits and robot arm configurations. Also included is an explanation of robot singularity using both wrist and overhead or polar singularity as examples, along with how to avoid singularity. And finally, an examination of starting poses for robot circular paths and using bases with robot positioner motions.
Software Version: 4.5.0 or higher
0 answers.
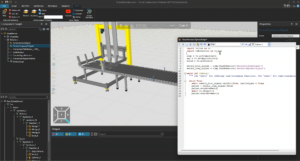
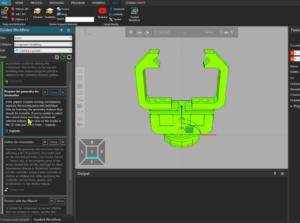
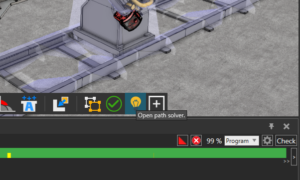
Robot Offline Programming (OLP)
Introduces searching as a function in robotic welding and possibilities of utilizing searches in robot programming when using Visual Components OLP.
Robot Simulation
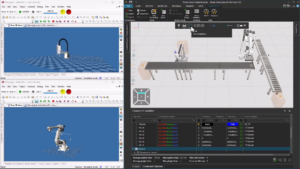
Shows potential of the KUKA.Sim AddOn for execution of offline programs on a real robot in synchronized or mirrored view.
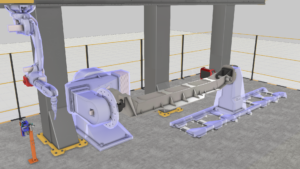
Robot Simulation
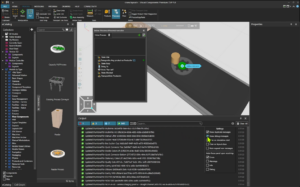
Shows potential of the KUKA.Sim AddOn for configuration, settings and programming of external axes or a workpiece positioner.
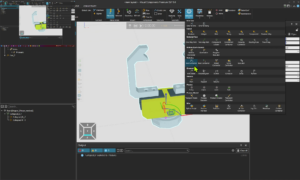
Robot Simulation
Introduces the potential of the KUKA.Sim Add On regarding Safe Operation configuration.
Robot Simulation
Introduces the potential of the KUKA.Sim Add On regarding programming, cycle time, tracing and the export to a real KUKA robot.
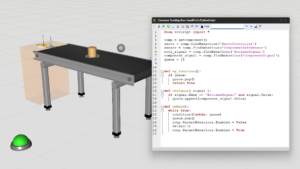
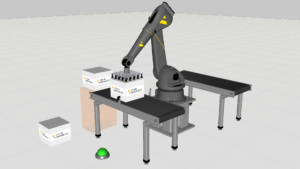
Robot Simulation
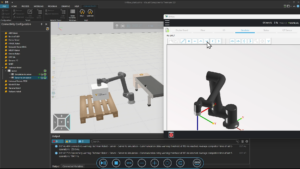
Learn some basics on how to use an articulated robot to pick up a part.
Robot Simulation
Learn how to locate a robot in order to reach all of the required positions in a layout using Visual Components.
Robot Simulation
This video provides an overview of robotics in Visual Components.