Lesson
Find and Use Python Add-ons
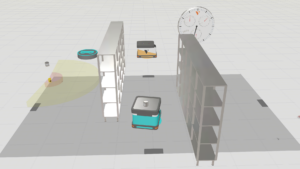
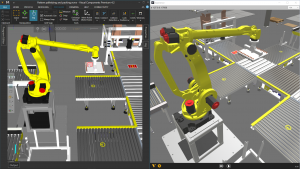
Making a robot mobile is about allowing the robot to move around and do work. How the robot moves is important to ensure the robot goes to the right location in a safe manner. Is the robot alone? Generally, no. A mobile robot may have to share space and interact with other robots, equipment and people. This is where collision avoidance, path planning, route calculations, and optimization of work are well suited for simulation.
In this course you learn how to model a mobile robot and define its logic using the Python API. You will learn how to define the attributes and limits of a vehicle (speed, acceleration, deceleration); create paths and assign routes for vehicle movement; use vectors and matrices to calculate waypoints for vehicles; interpolate vehicle movement to be linear, curved or offset; plan and reroute vehicles to prioritize tasks and avoid collisions; pick up, contain, and deliver products using a vehicle; and queue and prioritize tasks as well as use transport protocols for managing vehicles.
Begin course
TOPIC: COMPONENT MODELING
Duration: 1h 32min
Requirements:
To complete the course you will need to use either Visual Components Professional or Premium. You do not need to have any programming experience in Python.
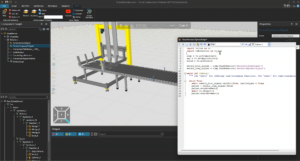
Component Modeling
Learn how to make any component into a vehicle that can move during a simulation.
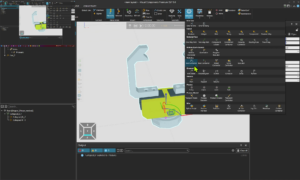
Component Modeling
Learn how to visualize the path of a vehicle by sweeping its geometry.
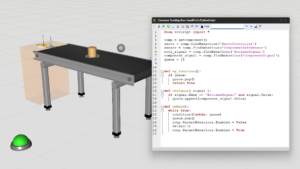
Component Modeling
Learn how to drive a vehicle to multiple points and other components.
Component Modeling
Learn how to interpolate the path of a vehicle, for example to move point-to-point in a straight or curved line.
Component Modeling
Learn how to get the travel time and distance of a vehicle’s path as well as stop and reroute a vehicle.
Component Modeling
Learn how to rotate and turn a vehicle.
Component Modeling
Learn how to offset the path of a vehicle, for example to avoid collisions and create lanes of traffic.
Component Modeling
Learn how to attach and detach components that can travel with a vehicle.
Component Modeling
Learn how to offset the origin of a vehicle, thereby defining what part of a vehicle passes through waypoints.
Component Modeling
Learn how to use signals to move a vehicle.
Component Modeling
Learn how to grab and transfer components into a vehicle using containment and flow logic.
Component Modeling
Learn how to deliver parts with a vehicle using pickup and drop-off information.