Lesson
Find and Use Python Add-ons
COMPONENT MODELING | COMPONENT SCRIPTING
Software Version: 4.0.2 or higher
15 answers.
Component Modeling
Learn how to create a Python 3 script, wait signal values, and write property values.
Component Modeling
Learn what blocking functions are and how to use them.
Component Modeling
Learn what blocking functions are and how to use them.
Component Modeling
Get an overview of Python version 2.7 objects, using snippets and a script to add functionality to a component.
Component Modeling
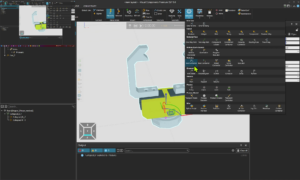
In this tutorial, you will learn how to handle CSV files in Visual Components using Python scripts.
Component Modeling
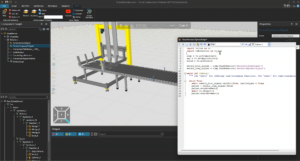
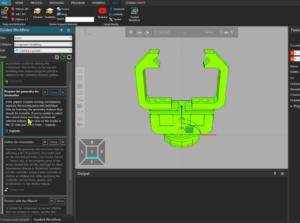
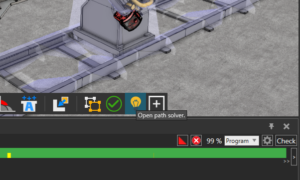
Learn how to create a python add-on to import point cloud files. This video shows how to access a file, read its contents, and create a point set from the data.
Component Modeling
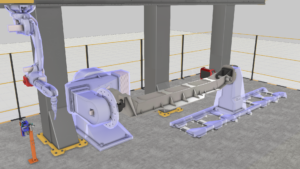
Learn how to route products on a conveyor line based on product material using components and API.
Component Modeling
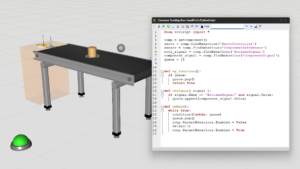
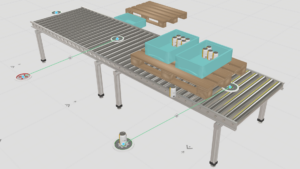
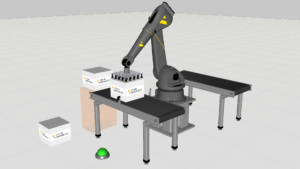
Learn how to attach objects to conveyor paths, thereby populating a conveyor with containers such as boxes, trays and sleds.