Lesson
Find and Use Python Add-ons
CONNECTIVITY | CONNECTING TO SERVER
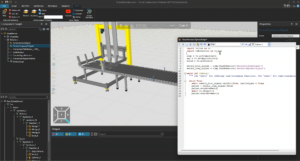
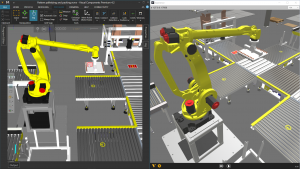
In this hands-on tutorial, you will learn how to establish a live connection between a DENSO robot and Visual Components using the Connectivity tab and the DENSO WINCAP environment. The lesson walks you through reviewing the robot model, preparing the simulation layout, configuring the b-CAP communication service, and finally testing joint movement and running robot programs directly from Visual Components. By the end, you will understand how to bridge virtual simulation with real robot control, enabling online programming, monitoring, and verification.
Note: that to complete this exercise you will need the following:
WINCAPS 3 – Offline programming software and VRC for Denso robots
Software Version: 5.0 or higher
Product: Premium or Premium OLP
0 answers.
Connectivity
Learn how to use LS Electric connectivity plugin
Connectivity
Learn how to use the MQTT Client to connect to an MQTT broker.
Connectivity
Learn how to use connectivity plugin for Techman robots.
Connectivity
Learn how to use MELFA robot connectivity plugin.
Connectivity
Learn how to connect a Yamaha robot to simulation.
Connectivity
In this tutorial you will learn how to connect a Visual Components Omron robot model to Omron ACE software.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Kawasaki robot controller.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Yaskawa robot controller.