Lesson
Find and Use Python Add-ons
CONNECTIVITY | CONNECTING TO SERVER
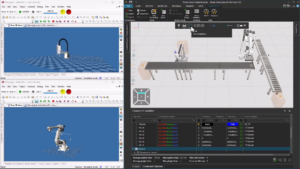
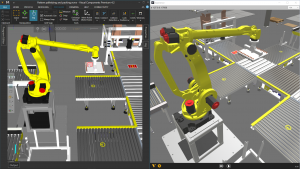
In this tutorial, you will learn how to connect a Mitsubishi MELFA robot to Visual Components using the built-in Connectivity tools. The lesson guides you through setting up the layout, configuring RT ToolBox3, preparing robot programs, and pairing variables so Visual Components and the real or virtual robot can exchange data in real time. By the end of the tutorial, you will understand how to establish a stable connection for online testing, program validation, and robot simulation workflows.
Software Version: 5.0 or higher
Product: Premium or Premium OLP
0 answers.
Connectivity
Learn how to use LS Electric connectivity plugin
Connectivity
Learn how to use the MQTT Client to connect to an MQTT broker.
Connectivity
Learn how to connect a Denso robot to simulation.
Connectivity
Learn how to use connectivity plugin for Techman robots.
Connectivity
Learn how to connect a Yamaha robot to simulation.
Connectivity
In this tutorial you will learn how to connect a Visual Components Omron robot model to Omron ACE software.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Kawasaki robot controller.
Connectivity
In this tutorial you will learn how to connect a simulation model to a Yaskawa robot controller.