Lesson
Find and Use Python Add-ons
COMPONENT MODELING | ROBOTICS
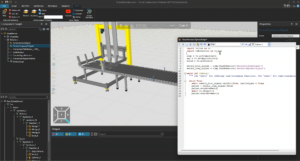
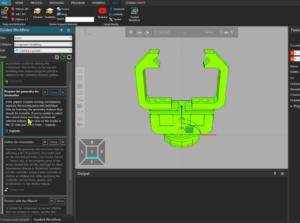
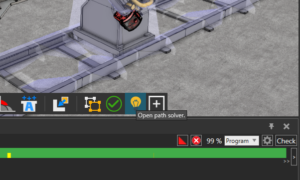
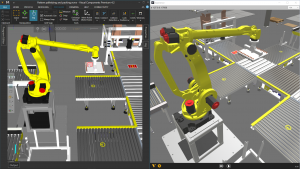
In this tutorial, you will learn how to create a fully functional robot gripper in Visual Components using Motion Controller behavior. The lesson guides you through the complete workflow—from importing your custom 3D model to setting up joints, interfaces, tool frames, and a robot program that drives the gripper’s motion. By the end, you will understand how to build a gripper that behaves realistically in simulation and can be controlled directly from robot programs or external signals.
Software Version: 5.0 or higher
Product: Premium, Professional, Premium OLP or Professional OLP
0 answers.
Component Modeling
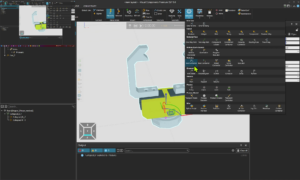
Explains the steps needed to model a functioning OLP layout from CAD with examples.
Component Modeling
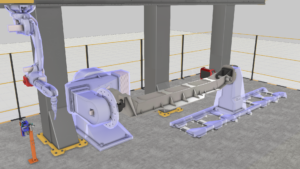
In this tutorial you will learn how to create a dual axis rotary positioner from imported geometry in Visual Components.
Component Modeling
In this tutorial you will learn how to single axis robot positioner from imported geometry.
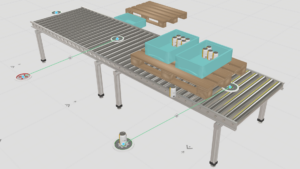
Component Modeling
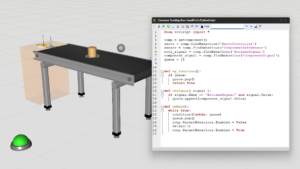
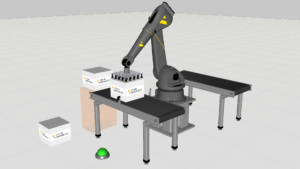
Learn how to teach a robot to grasp and release components using a gripper modeled from imported geometry.
Component Modeling
Learn how to model a gripper from imported geometry.