Lesson
Find and Use Python Add-ons
ROBOT OFFLINE PROGRAMMING (OLP)
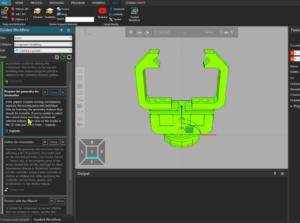
The workflow to create a weld includes 4 steps. The first step is to create a weld path, the next is to generate a search, 3rd step is to validate the path for any problems, and the final step is to post-process the program.
Software Version: 4.8.0 or higher
Product: Premium OLP, Professional OLP or Robotics OLP
11 answers.
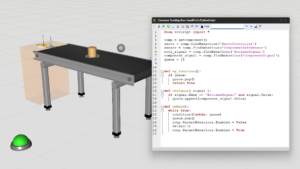
Component Modeling
Learn how to create a Python 3 script, wait signal values, and write property values.
Connectivity
Learn how to use LS Electric connectivity plugin
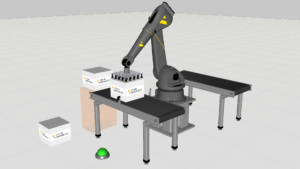
Component Modeling
Learn how to use Motion Controller behavior for modeling a gripper.
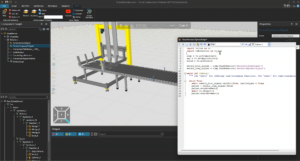
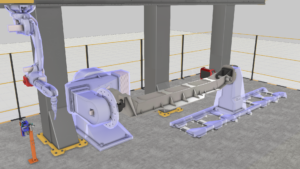
Robot Offline Programming (OLP)
Connecting to a Fronius Power Source and Managing Programs.
Getting Started
Use output panel for an improved filtering messages and separate infos, warnings, and errors.
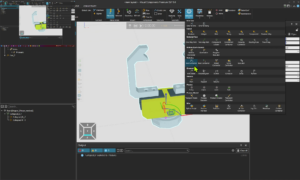
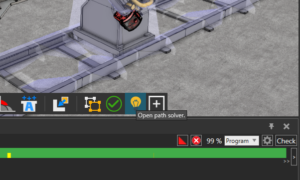
Robot Offline Programming (OLP)
Learn how to use the solver to remove path problems such as joint limits, collisions, etc.
Robot Offline Programming (OLP)
Learn how to create collision geometries.
Robot Offline Programming (OLP)
Learn how to use WPS Rule Manager and WPS Rule Selector.
Robot Offline Programming (OLP)
Connecting to a Fronius Power Source and Managing Programs.
Robot Offline Programming (OLP)
Learn how to use the solver to remove path problems such as joint limits, collisions, etc.
Robot Offline Programming (OLP)
Learn how to create collision geometries.
Robot Offline Programming (OLP)
Learn how to use WPS Rule Manager and WPS Rule Selector.
Robot Offline Programming (OLP)
Introduces searching as a function in robotic welding and possibilities of utilizing searches in robot programming when using Visual Components OLP.