Lesson
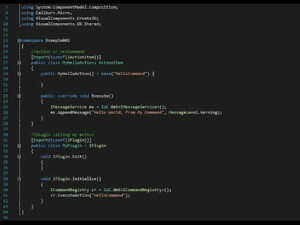
Find and Use Python Add-ons
ROBOT PROGRAMMING | ROBOT TEACHING
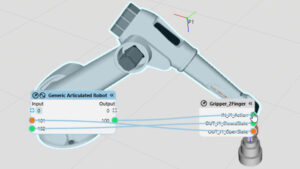
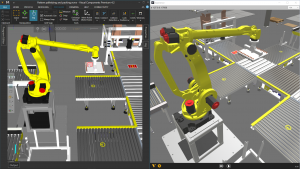
A continuation of our Robot Reachability Part I video, in this video you will learn how to check robot joints, joint limits and robot arm configurations. Also included is an explanation of robot singularity using both wrist and overhead or polar singularity as examples, along with how to avoid singularity. And finally, an examination of starting poses for robot circular paths and using bases with robot positioner motions.
Software Version: 4.5.0
0 answers.
Robot Programming
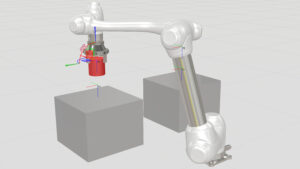
Learn some basics on how to use an articulated robot to pick up a part.
Robot Programming
Learn how to locate a robot in order to reach all of the required positions in a layout using Visual Components.
Robot Programming
This video provides an overview of robotics in Visual Components.
Robot Programming
Learn how to use the ElseIf and Set state statements in robot programming.
Robot Programming
Learn how to implement different solutions into buttons on the overlay menu.
Robot Programming
Learn how to pick and place parts using While loops and variables in a robot program.
Robot Programming
Learn how to loop the execution of a robot program and its statements.
Robot Programming
Learn how to edit the tool frames of a robot during a simulation.