Lesson
Find and Use Python Add-ons
ROBOT SIMULATION | ROBOT TEACHING
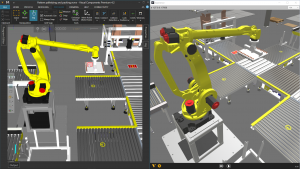
A continuation of our Robot Reachability Part I video, in this video you will learn how to check robot joints, joint limits and robot arm configurations. Also included is an explanation of robot singularity using both wrist and overhead or polar singularity as examples, along with how to avoid singularity. And finally, an examination of starting poses for robot circular paths and using bases with robot positioner motions.
Software Version: 4.5.0 or higher
0 answers.