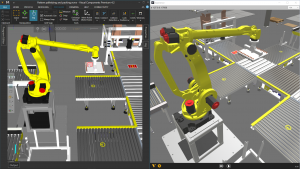
Learn how to connect a Universal Robots controller with a 3D simulation. This includes teaching, simulating and post processing programs for collaborative robots (cobots).
Software Version: 4.0.4
TABLE OF CONTENTS
Turn on the connectivity feature Add robot to the 3D world Add a new server in VC for RTDE connection Initialize robot in URSim Find the IP address of the Polyscope virtual machine Connecting to virtual robot controller from VC Pair simulation and server joint variables Interact with the robot in the URSim Running a program on the virtual controller Download a robot language post processor from the VC forum Create a simple test program in VC Post processing a robot program in VC Running the post processed program in the URSim